栈和队列
栈和队列
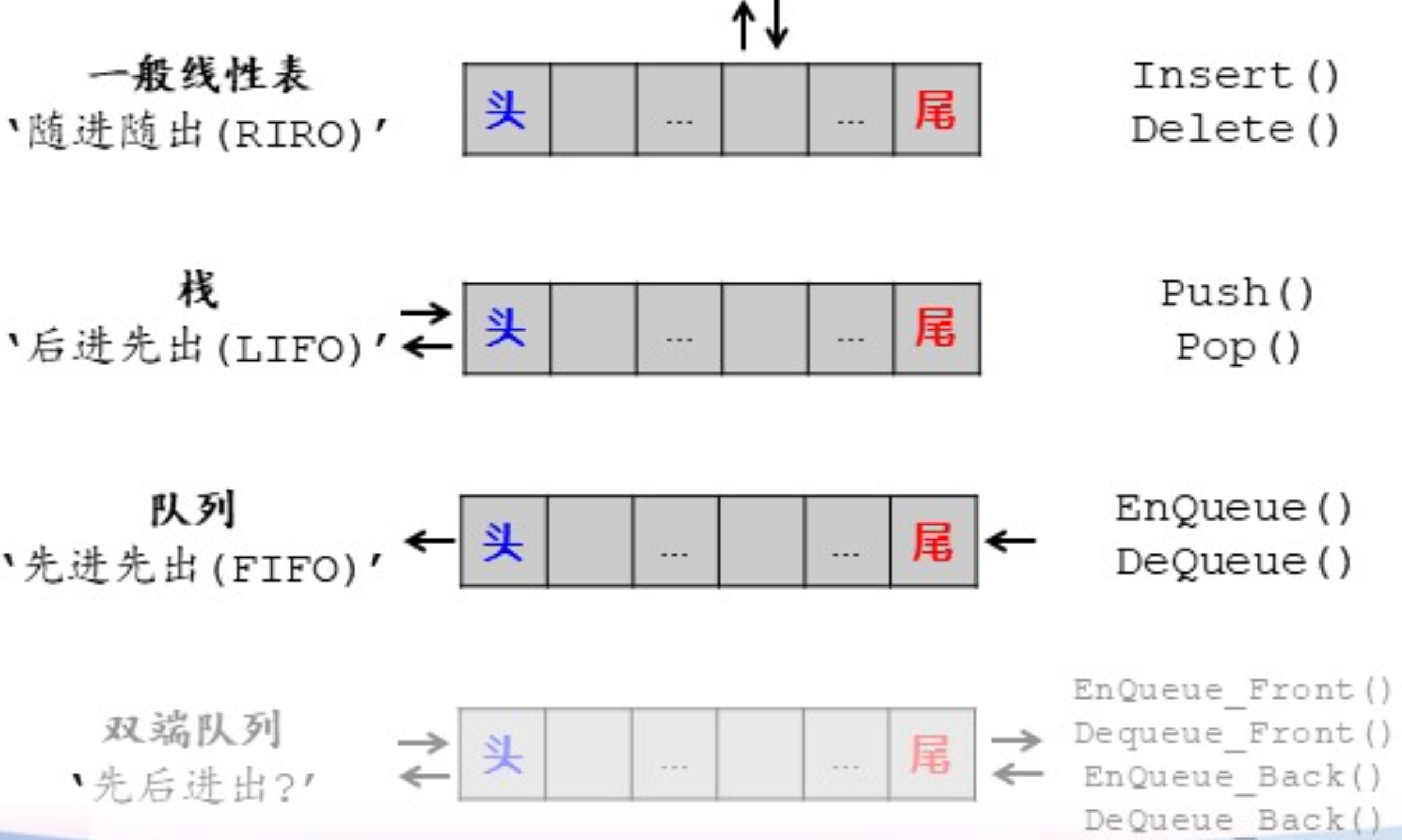
栈、队列、双端队列均是线性表的特殊情况(访问受限的线性表)
栈
- 允许插入、删除的一端称为栈顶(top),另一端称为栈底(bottom)
- 在栈顶插入元素称为入栈(push),删除元素称为出栈(pop)
顺序栈——栈的顺序存储实现
顺序栈存储空间的处理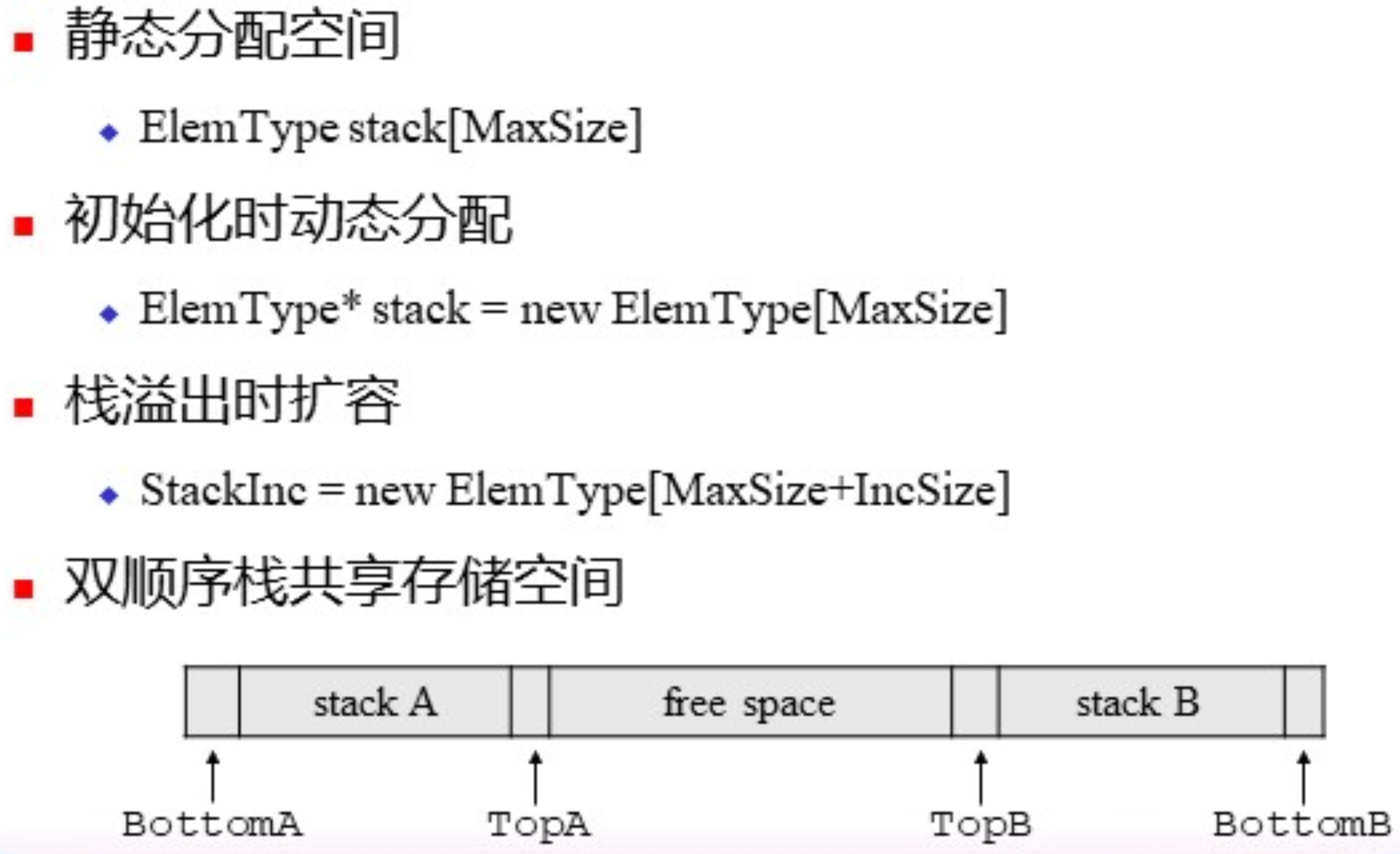
顺序栈的特点:
- 顺序栈的入栈和出栈、构造和销毁的复杂度都是$O(1)$
- 可以采用溢出时增容,或者共享栈的方式提高空间利用率
链式栈——栈的链式存储分配实现
链式栈的特点:
- 链式栈的入栈和出栈复杂度为$O(1)$,构造和销毁的复杂度是$O(n)$(需要逐个释放/创建)
- 栈的长度动态变化,空间利用率高,一般无需判断溢出
栈的应用
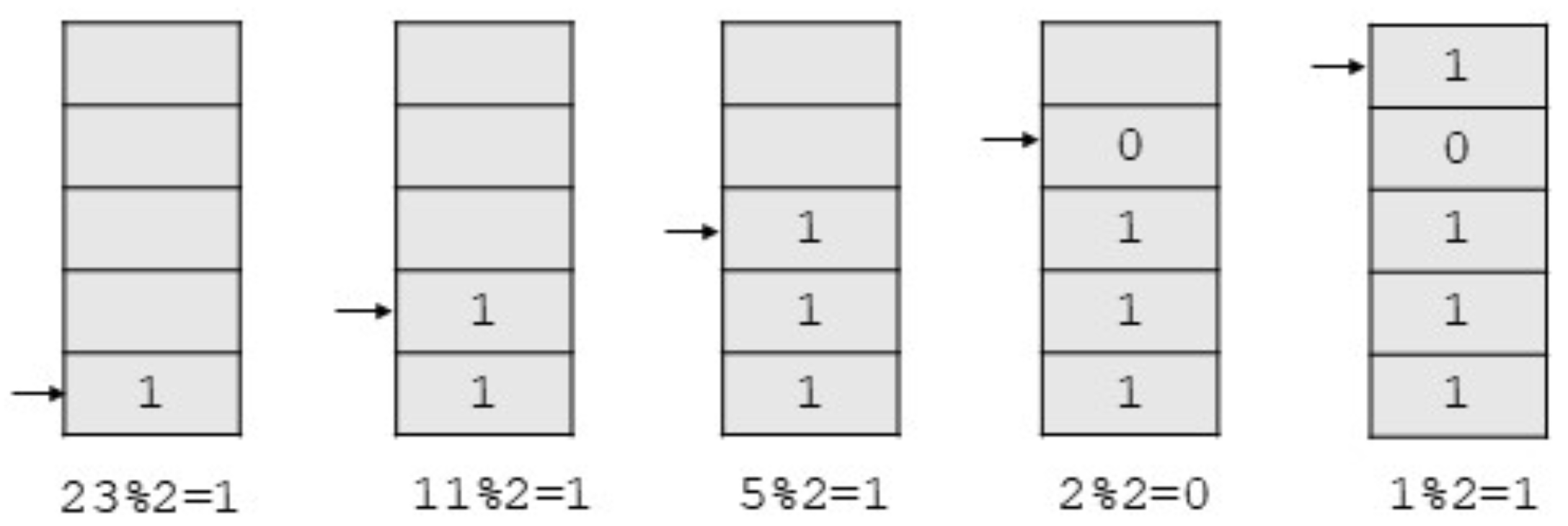
十进制数到二进制数的转换
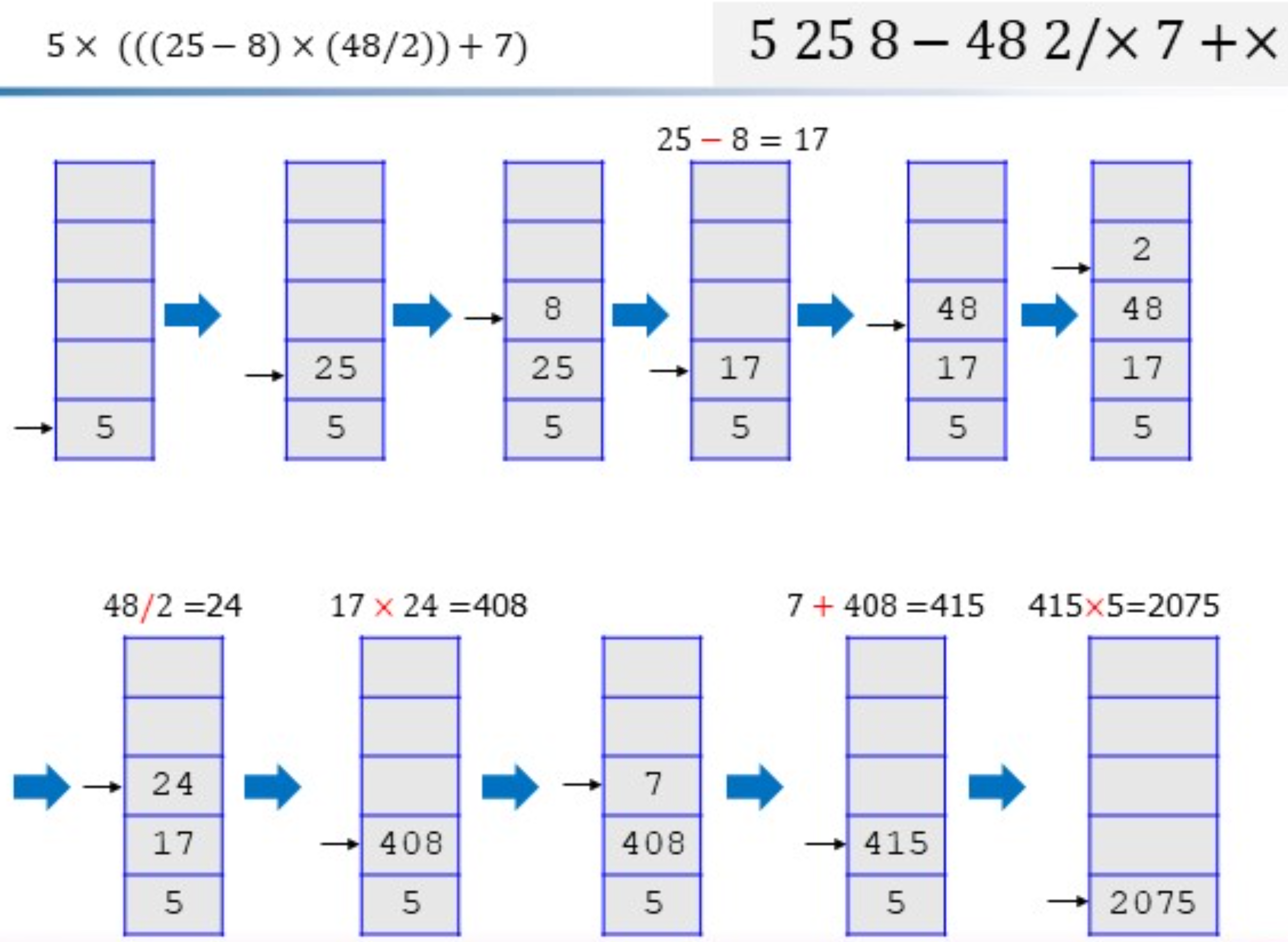
算术表达式求值的栈实现
中缀表达式实现步骤:
- 初始化:结束符‘#’入栈:
Sr.Push(‘#’) - 如果W是操作数则入栈:
Sd.Push(W) - 若W为运算符,则有以下几种情况:
- 若W优先级高于Sr栈顶元素则入栈:
Sr.Push(W) - 若W优先级低于Sr栈顶元素则执行运算操作:
Sd.Pop(x1);
Sd.Pop(x2);
Sr.Pop(@);
Sd.Push(x2@X1); - 若W等于Sr栈顶元素则弹出Sr栈顶元素
- 若W优先级高于Sr栈顶元素则入栈:
Sd即为运算结果
中缀转后缀表达式:
维护两个栈:运算符(OP)和结果栈(R)
- 扫描到操作数,R入栈;扫描到’(‘,OP入栈
- 扫描到运算符:
当前运算符优先级高于OP栈顶元紊优先级,OP入栈
否则,则OP栈出栈,R栈入栈 - 扫描到’)’,OP出栈,到pop出’)’为止。如果pop出的元素不是’(‘或’)’,则将元素压入R
- 初始化:结束符‘#’入栈:
递归
适用情况:问题可以收敛
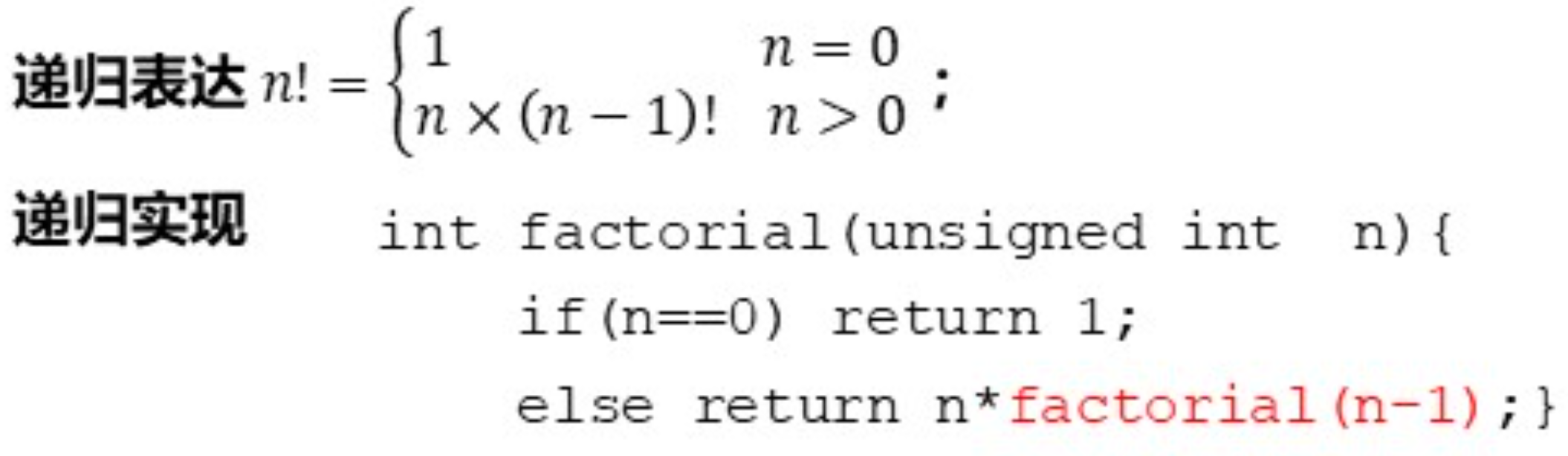
阶乘求值
阿克曼函数
特点:随着输入值的增加,函数的值增长得非常快
定义如下:
递归实现:1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
using namespace std;
int c(int m, int n) {
if(m == 0) return n + 1;
if(n == 0 && m > 0) return c(m - 1, 1);
if(m > 0 && n > 0)return c(m - 1, c(m, n - 1));
}
int main() {
int a, b;
cin >> a >> b;
cout << c(a, b);
return 0;
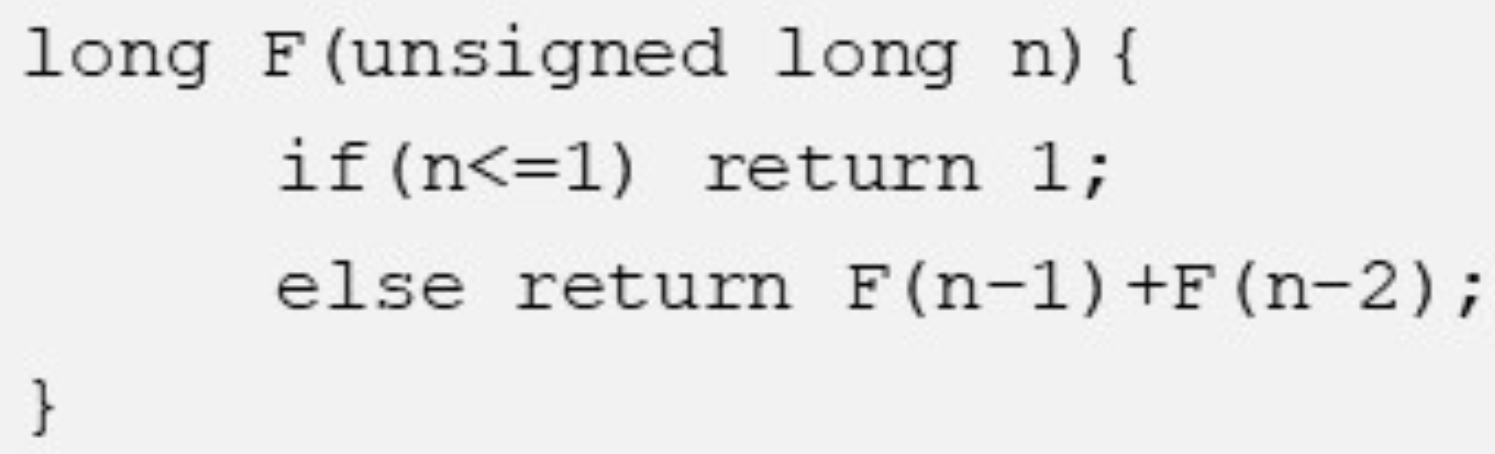
}斐波那契数列
递归定义:
递归实现:
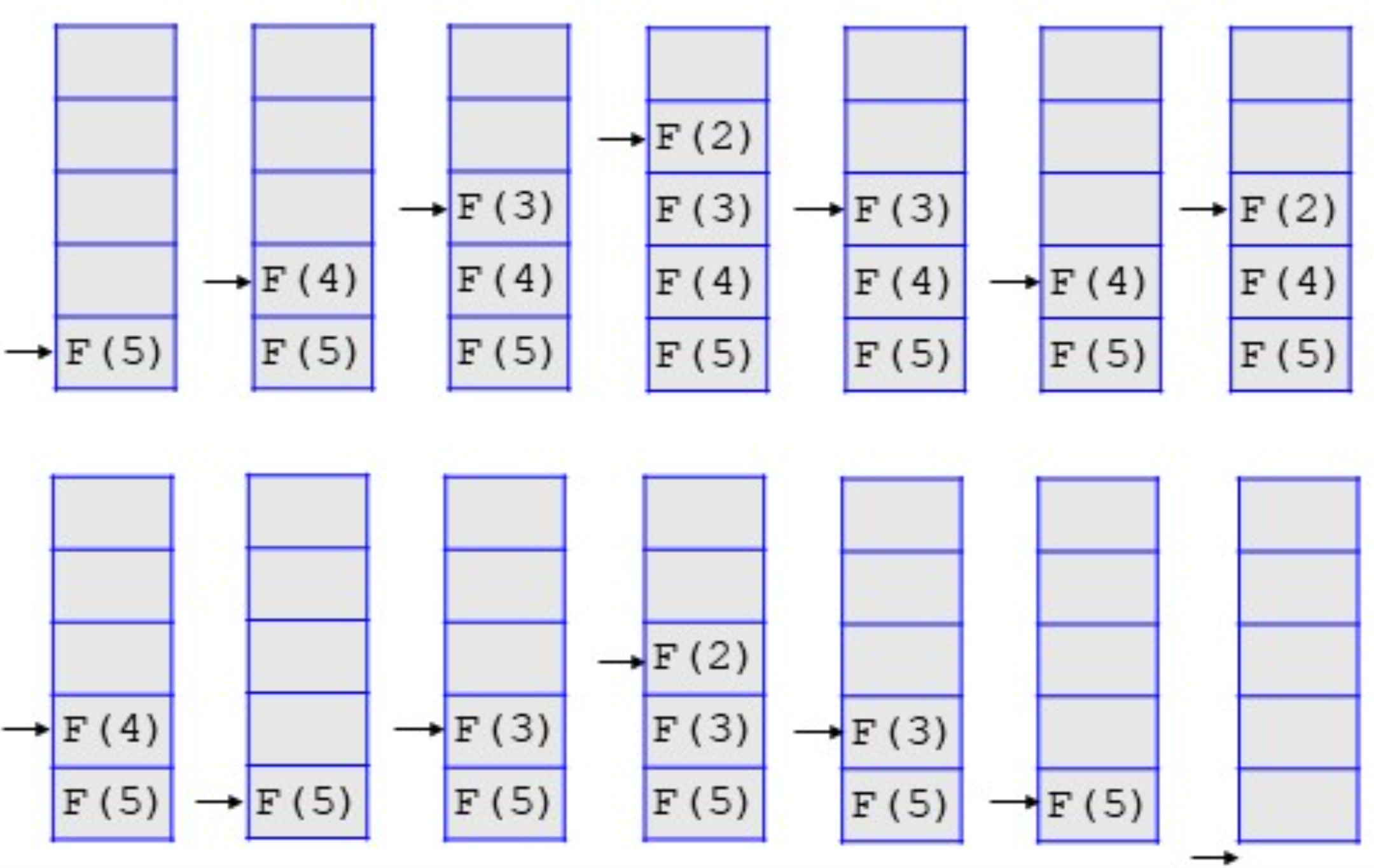
F(5)的栈调用情况:
最大公约数
定义:可以同时除尽两个正整数的最大的正整数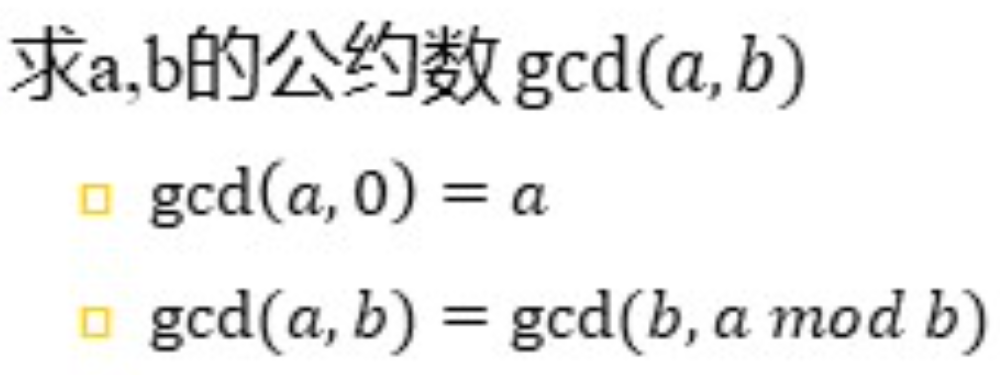
递归实现:
1
2
3
4
5
6long gcd(unsigned long a,unsigned long b)
{
int r = a % b;
if(r != 0) return gcd(b,r);
else return b;
}互递归
定义:一种非直接递归,两个函数互相借助对方定义
示例: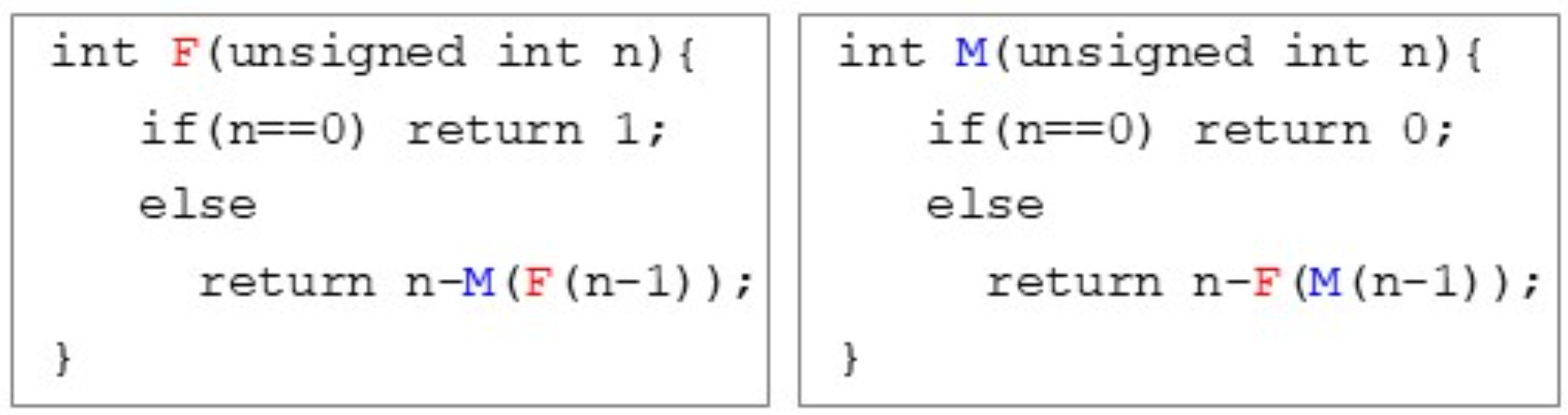
汉诺塔问题
递归步骤: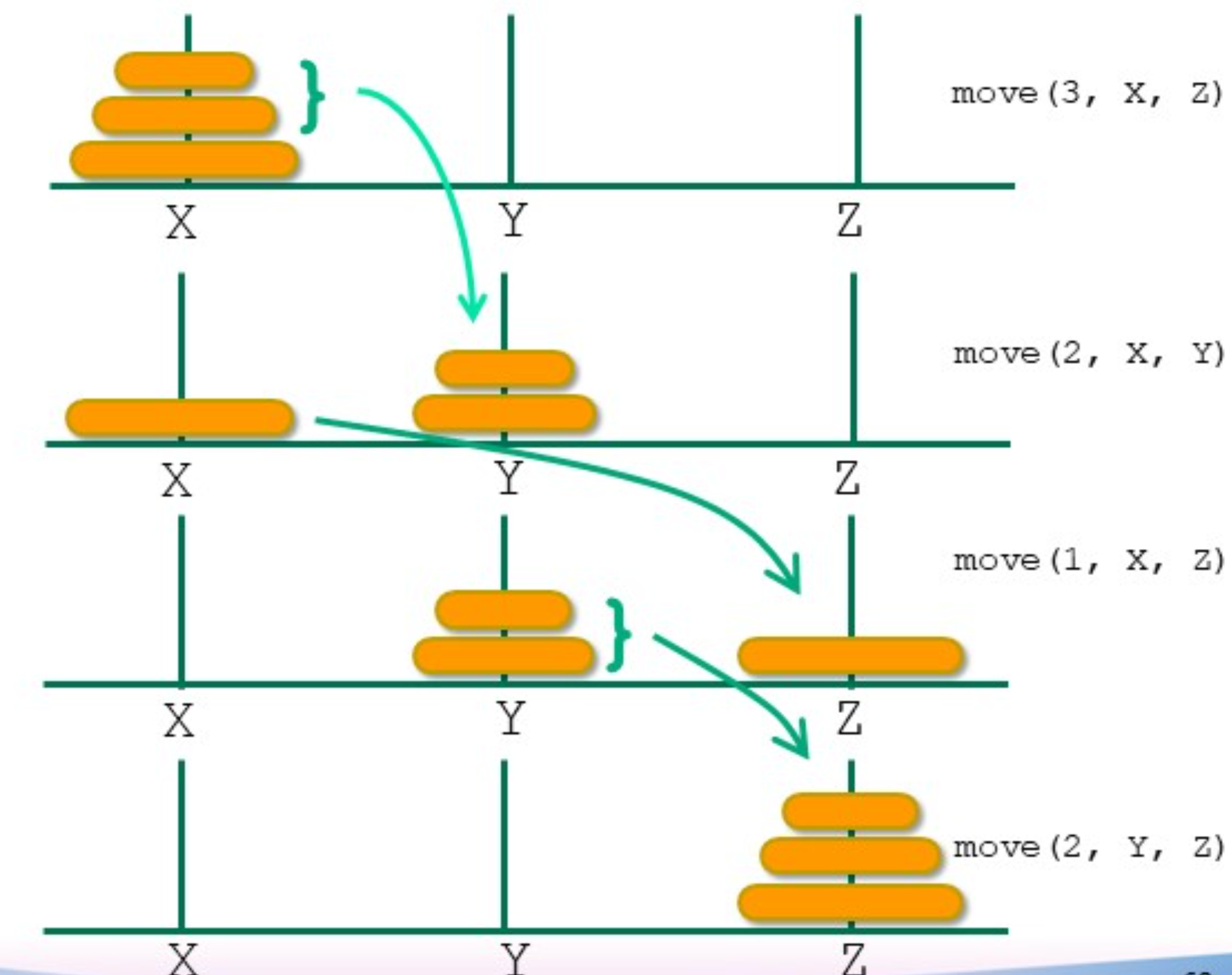
递归实现:
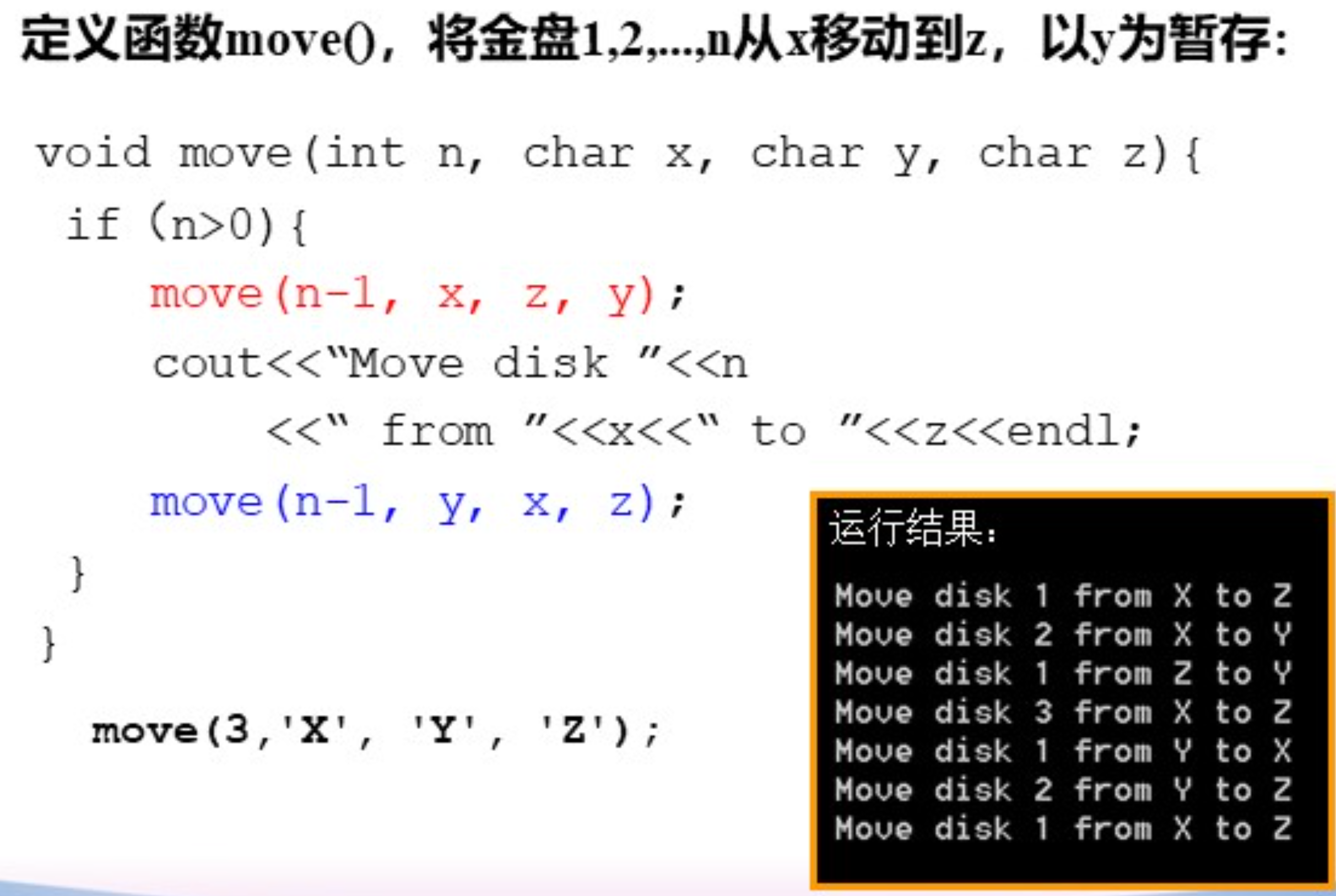
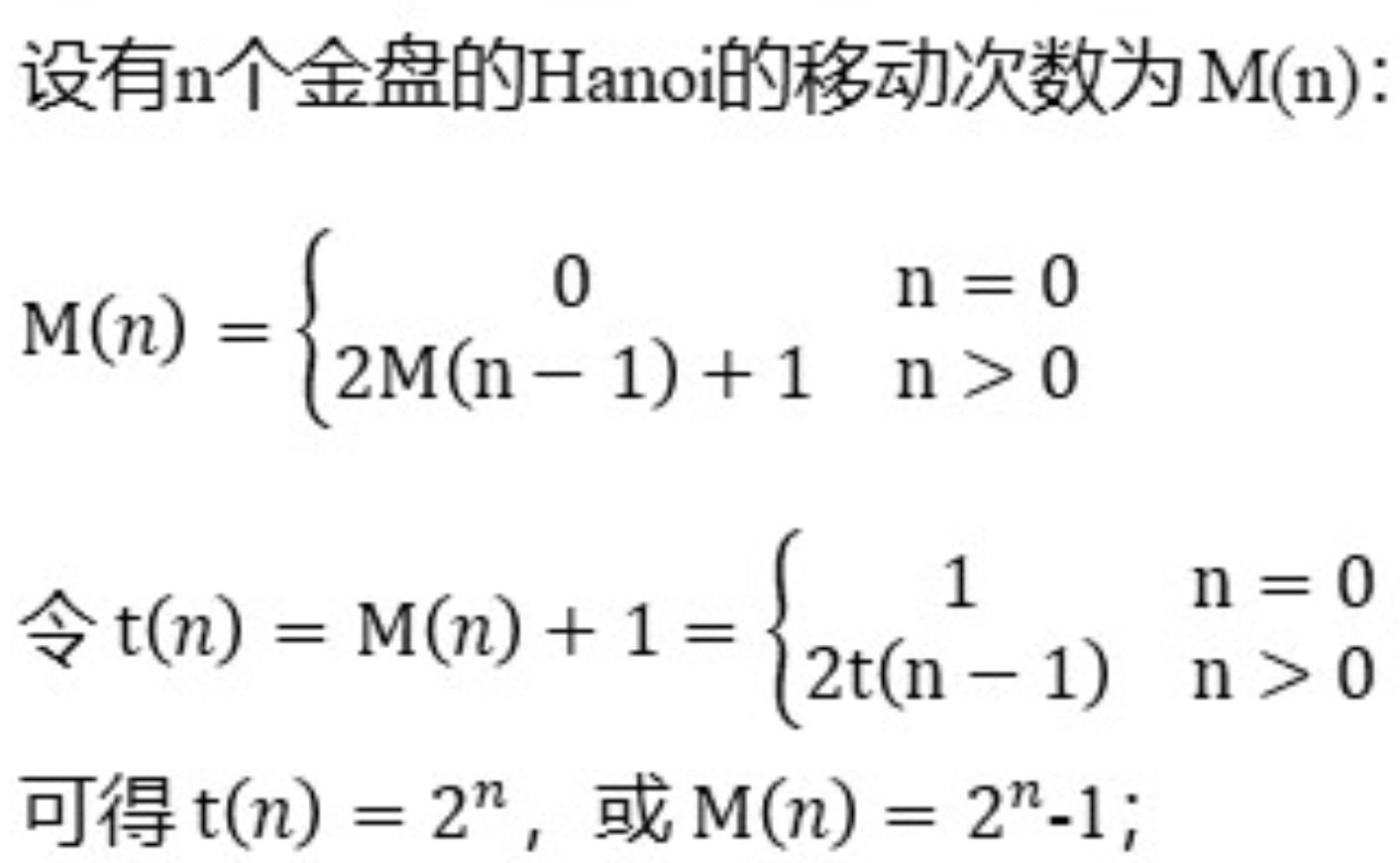
先把 n - 1 个移动到y,然后移动最底下的到z,然后把 n - 1 个从y移动到z复杂度分析:
递归的消去
尾递归
定义:函数最后操作时递归调用或平凡返回(返回已经存在的值)
为什么需要尾递归?
对于非尾递归来说,由于最后的返回值需要额外计算,因此经历了创建栈帧、销毁栈帧的过程,可能导致栈溢出。以计算阶乘的普通递归实现为例:
2
3
4
5
6
if (n == 0)
return 1;
else
return n * factorial(n - 1);
}
当调用factorial(3)时,执行过程如下:调用
factorial(3),创建栈帧A,保存参数n=3。
执行到return n * factorial(n - 1)时,需要先计算factorial(2)的值。调用
factorial(2),创建新的栈帧B,保存参数n=2。
执行到return n * factorial(n - 1)时,需要先计算factorial(1)的值。调用
factorial(1),创建新的栈帧C,保存参数n=1。
执行到return n * factorial(n - 1)时,需要先计算factorial(0)的值。调用
factorial(0),创建新的栈帧D,保存参数n=0。
执行到return 1,返回值1,销毁栈帧D。栈帧C继续执行,计算1 1=1,返回值1,销毁栈帧C。
栈帧B继续执行,计算2 1=2,返回值2,销毁栈帧B。
栈帧A继续执行,计算3 * 2=6,返回值6,销毁栈帧A。在这个过程中,每次递归调用都会创建新的栈帧,栈帧数量随着递归深度增加而增加,可能导致栈溢出,并且每次创建和销毁栈帧都会带来性能开销。
尾递归优化的执行过程:1
2
3
4
5
6int factorial_tail(int n, int acc) {
if (n == 0)
return acc;
else
return factorial_tail(n - 1, n * acc);
}
初始调用时,acc的初始值为1。例如,计算factorial_tail(3, 1)的执行过程如下:
调用factorial_tail(3, 1),创建栈帧A,保存参数n=3,acc=1。
执行到return factorial_tail(n - 1, n * acc)时,计算新的参数值n-1=2,$nacc=31=3$。
调用factorial_tail(2, 3),复用栈帧A,更新参数n=2,acc=3。
执行到return factorial_tail(n - 1, n * acc)时,计算新的参数值n-1=1,$nacc=23=6$。
调用factorial_tail(1, 6),复用栈帧A,更新参数n=1,acc=6。
执行到return factorial_tail(n - 1, n * acc)时,计算新的参数值n-1=0,$nacc=16=6$。
调用factorial_tail(0, 6),复用栈帧A,更新参数n=0,acc=6。
执行到return acc,返回值6,销毁栈帧A。
在这个过程中,每次递归调用复用当前栈帧,不需要创建新的栈帧,因此栈帧数量始终保持为1,不会导致栈溢出,并且避免了创建和销毁栈帧的性能开销。
底层原理
尾递归优化的关键在于编译器能够识别出尾递归调用,并将其转换为循环操作。具体来说,当编译器检测到一个函数调用是尾递归时,它会生成代码来复用当前的栈帧,而不是创建新的栈帧。这通常是通过将递归调用的参数更新到当前栈帧的变量中,并跳转到函数的开头重新执行来实现的。
常见简单问题的尾递归实现1
//TODO...
队列
定义:限制数据一端插入,另一端删除的特殊线性表
- 允许插入的一端称为队尾(rear),允许删除的一端称为队头(front)
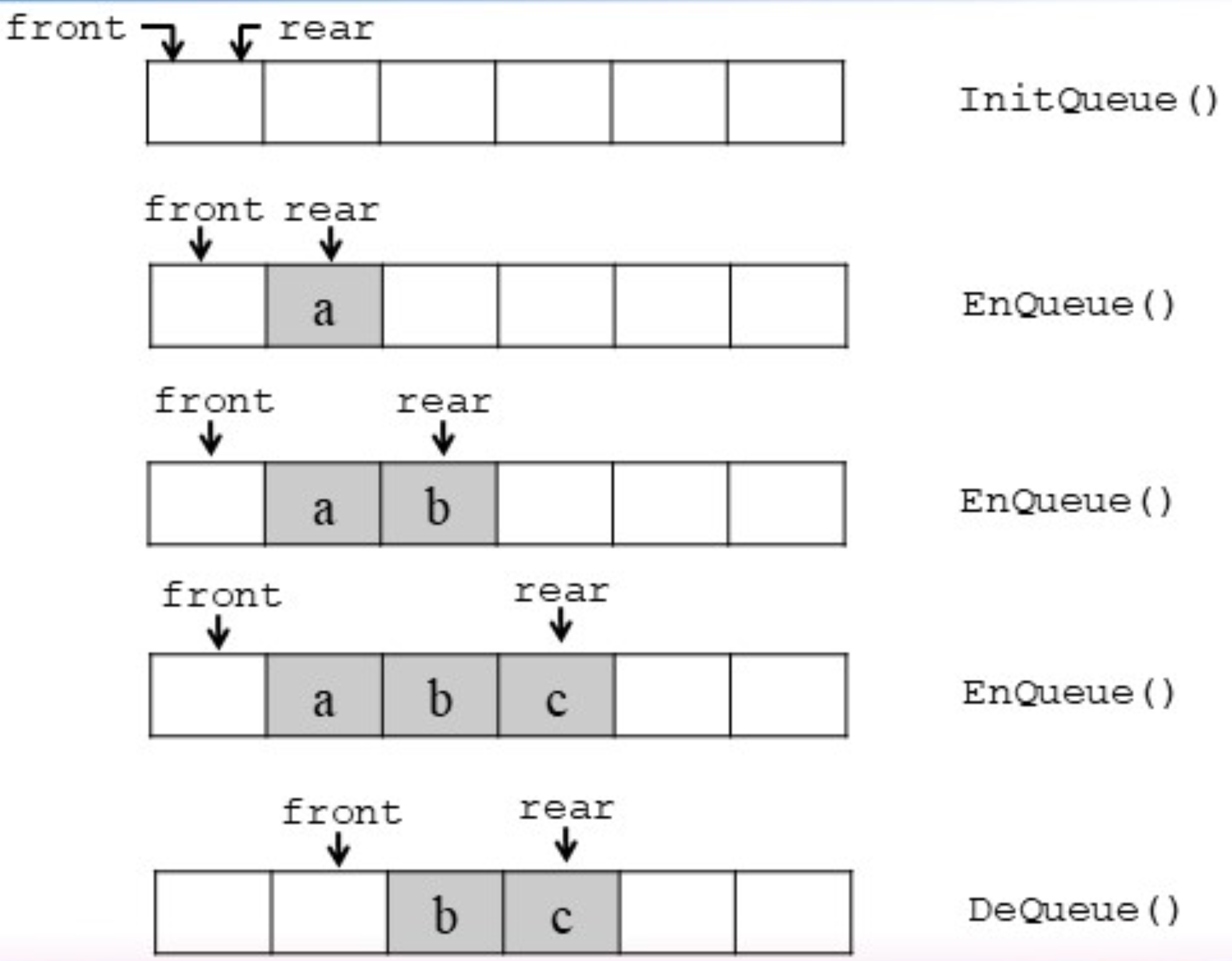
- 入队为Enqueue,出队为Dequeue
顺序队列
存储
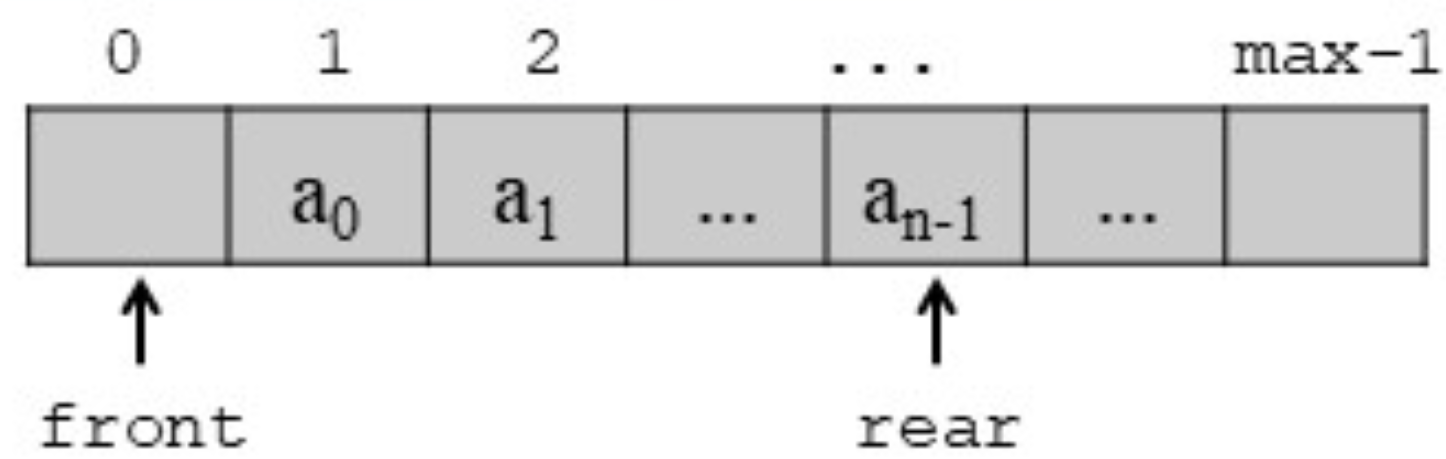
操作
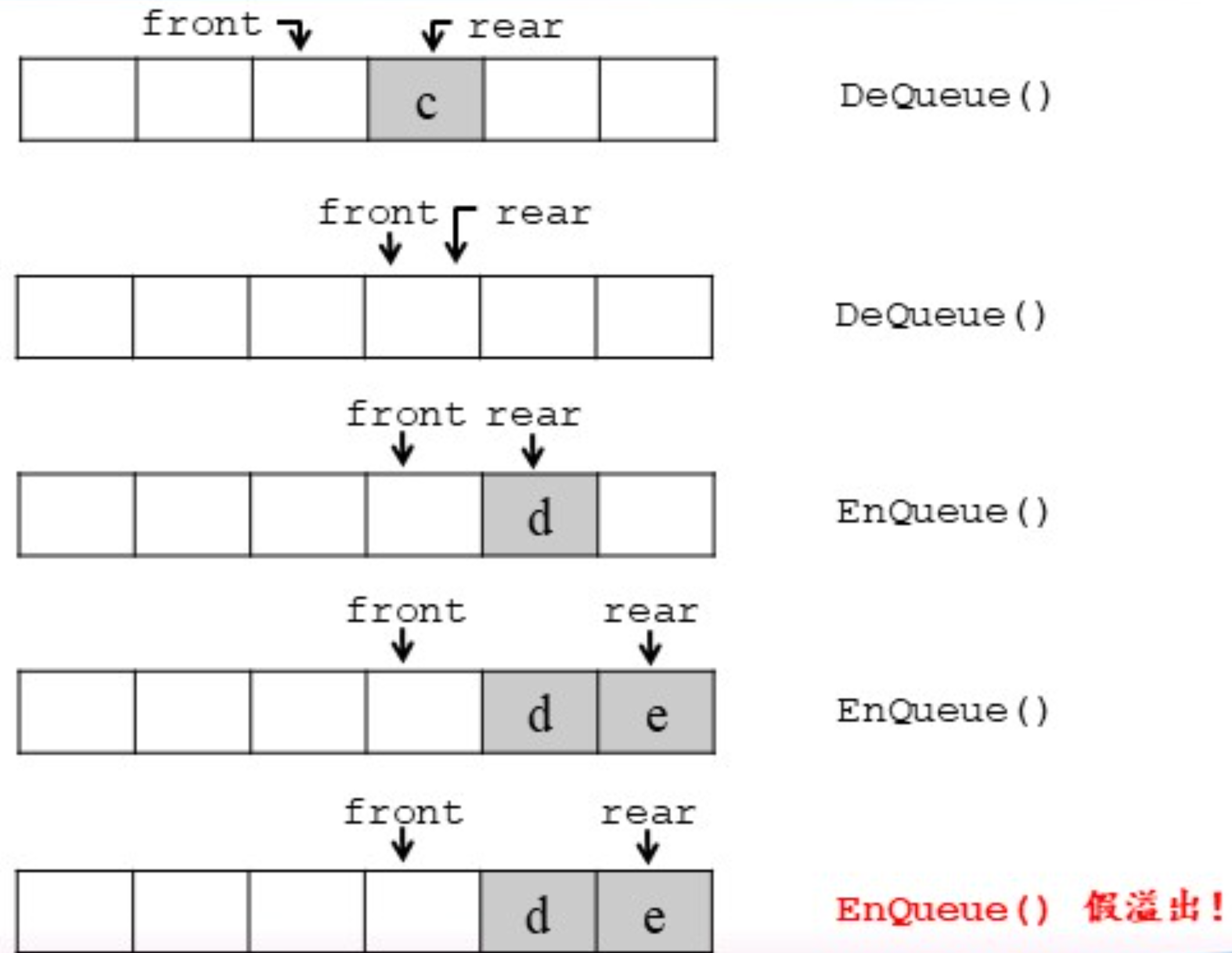
假溢出:rear已经到达数组末尾,尽管队列中仍有空闲空间(front之前的位置),但由于rear无法继续向后移动,导致假溢出。
循环队列——解决假溢出问题
顺序数列无法利用队头指针之前的空间,因此假溢出的本质是没有完全利用数组空间。而循环数列通过连成环解决了这一问题。由于首尾相接,因此循环队列需要做的只是找到判空和判满的办法。
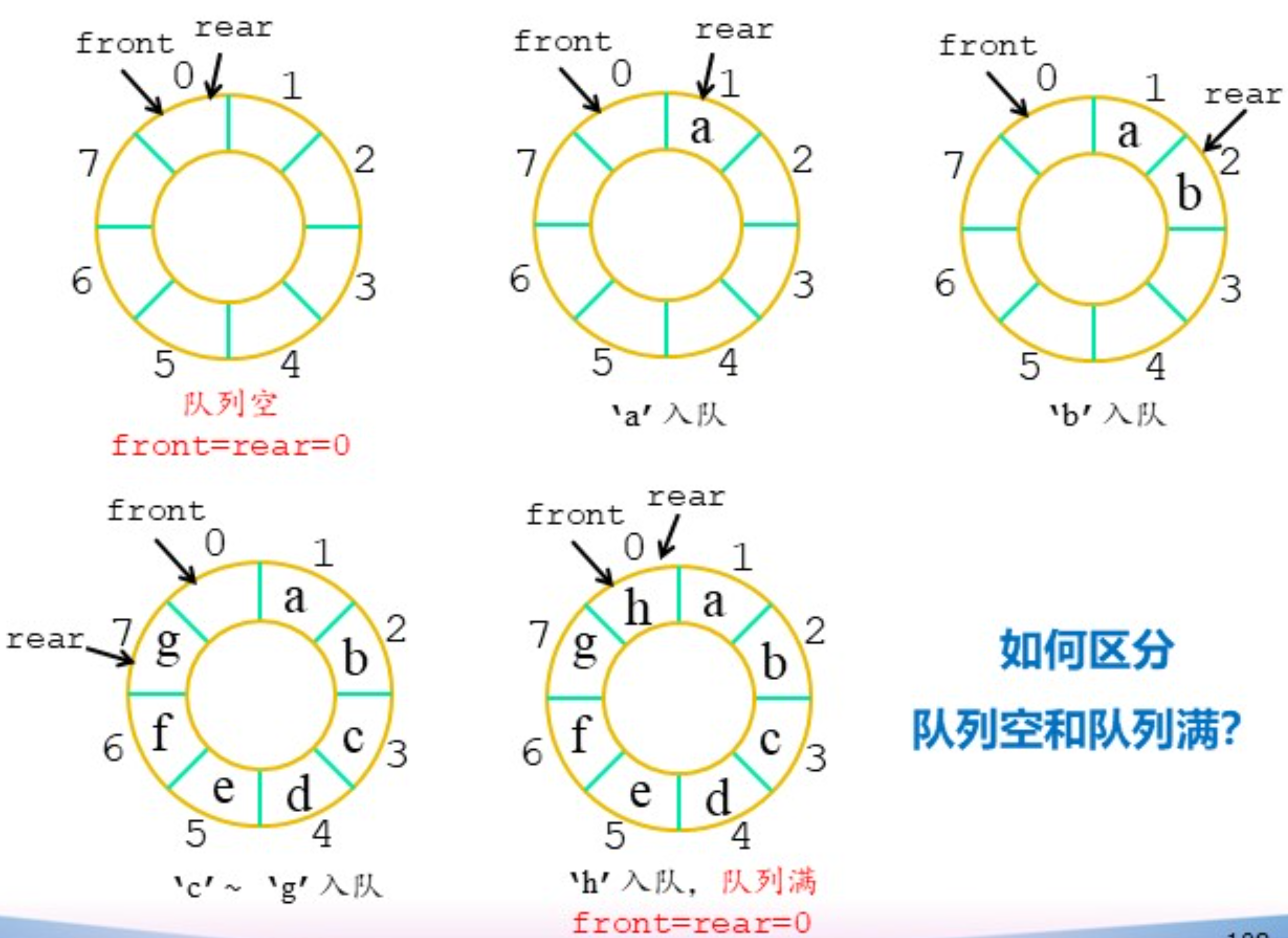
方法一:留出空位
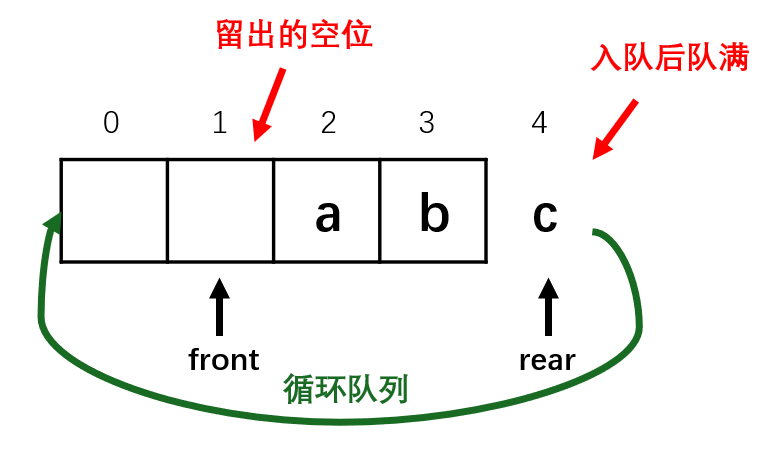
判断条件:- 队列为空:front == rear
- 队列为满:front == (rear + 1) % max
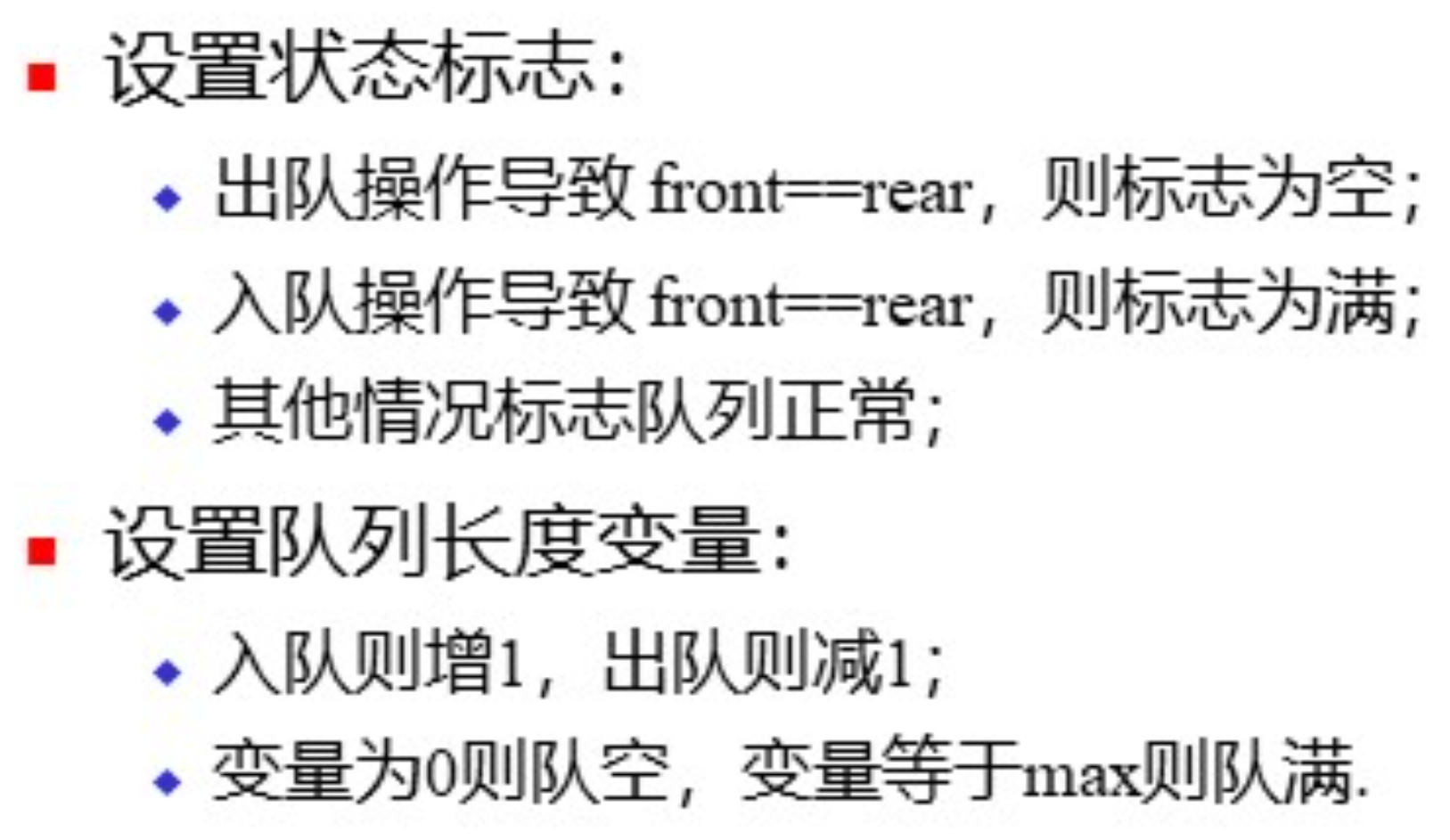
其他方法易于理解:
链式队列——链式存储方式
和链表的逻辑一致,易于理解: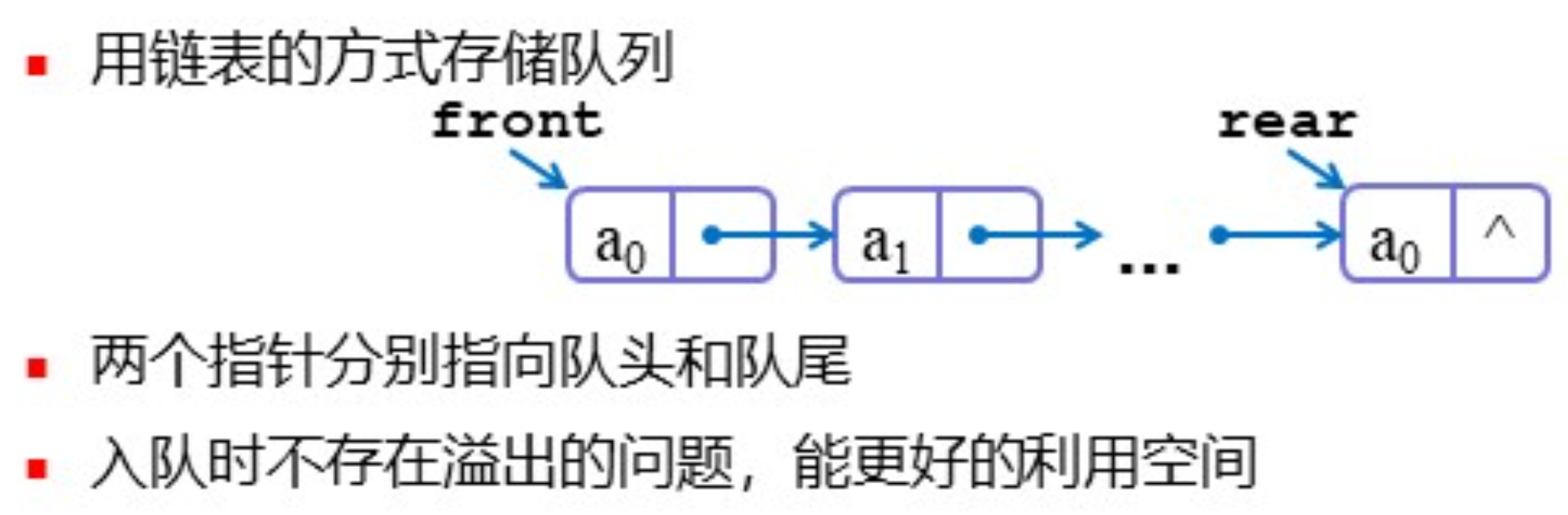
优先队列
易于理解: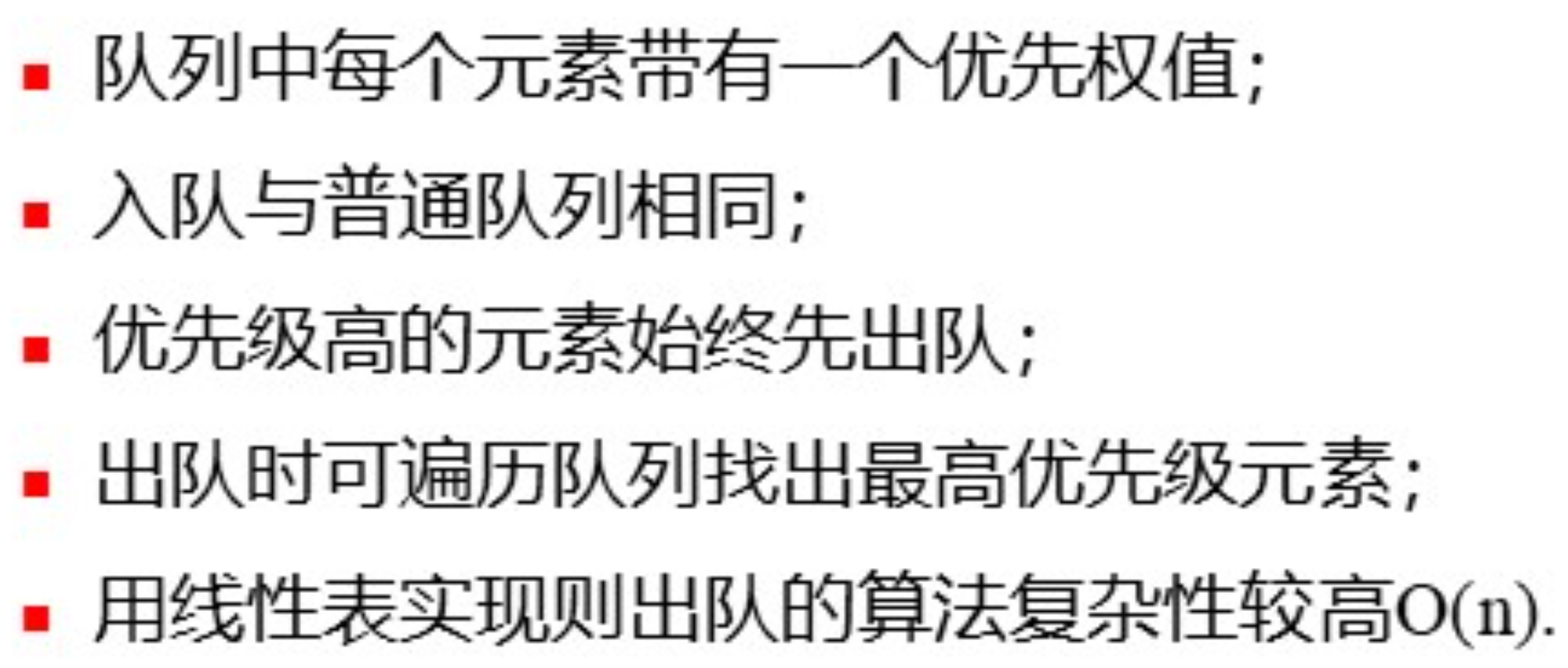
队列的应用:杨辉三角
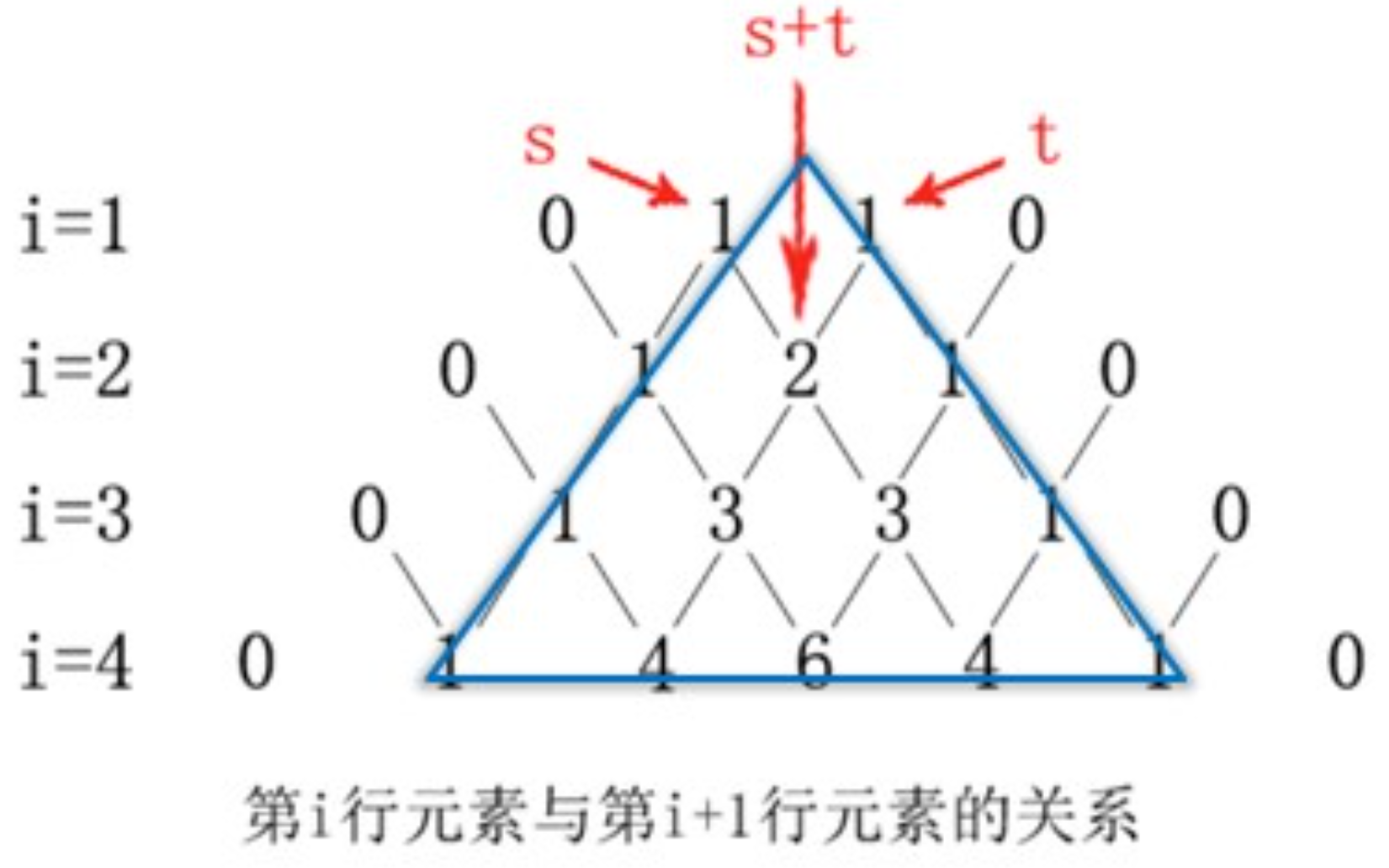
具体实现:
先进队一个1
此时队列: 1 (这样我们就得到了杨辉三角的第一行)
第一步:在队尾进队一个1
此时队列:1 1
循环0次(这里相当于没有进行操作)(看不懂就往下看)
此时队列:1 1
在队尾进队一个1
1 1 1
出队队头的一个1
1 1 (这样我们就得到了杨辉三角的第二行)
(这里看不懂没关系,接着看就懂了)
第二步:在队尾进队一个1(与第一步中相同操作)
1 1 1
循环一次:进队队头两个元素的和(1+1=2),即进队2;
1 1 1 2
再出队队头的一个元素(1)。这两个操作为一次循环。
1 1 2
在队尾进队一个1(与第一步中相同操作)
1 1 2 1
出队队头的一个1
1 2 1 (这样我们就得到了杨辉三角的第三行)
第三步:
在队尾进队一个1(与第一步中相同操作)
1 2 1 1
循环两次:第一次进队队头两个元素的和(1+2=3),即进队3;
1 2 1 1 3
再出队队头的一个元素(1)。这两个操作为一次循环。
2 1 1 3
第二次再进队队头两个元素的和(2+1=3),即进队3;
2 1 1 3 3
再出队队头的一个元素(2)。这两个操作为第二次循环。
1 1 3 3
在队尾进队一个1(与第一步中相同操作)
1 1 3 3 1
出队队头的一个1
1 3 3 1 (这样我们就得到了杨辉三角的第四行)
经过上面的三步操作,不难看出,每一步都分为三个部分。即:进1;循环;进1出1。所以我们可以控制重复上述步骤的次数,打印出想要的杨辉三角的层数。(并且可以看出,第一步循环0次;第二步循环1次;第三步循环2次。即循环次数为步数-1)
双栈实现队列
1 | //TODO... |